Python: Rørsle
Python: Rørsle
Skrevet av: Omsett frå microbit-micropython.readthedocs.io
Oversatt av: Stein Olav Romslo og Susanne Rynning Seip

Denne oppgåva er ein del av oppgåvesamlinga "Programmering i micro-python" og byggjer vidare på Python: Input og output.
Me tilrår at du lastar ned og skriv koden din i mu editor når du jobbar med desse oppgåvene. Instruksjonar for korleis ein lastar ned Mu finn du på nettsida via linken.
Når Mu er installert kan du kople micro:biten din til datamaskinen via ein USB-kabel. Skriv koden din i editor-vindauget og trykk på “Flash”-knappen for å laste koden over på micro:biten. Dersom det ikkje fungerer, sørg for at micro:biten har dukka opp som ei USB-eining på datamaskinen din.
Introduksjon
Micro:bit-en din er utstyrt med eit akselerometer som måler rørsle langs tre aksar:
-
X - tilte frå venstre til høgre.
-
Y - tilte framover og bakover.
-
Z - rørsle opp og ned.
Det er ein funksjon for kvar akse som returnerer eit positivt eller negativt tal som indikerer antal milli-g-krefter. Den viser 0 når du står i vater langs den aktuelle aksen.
Til dømes, her er eit enkelt program som viser deg kor mykje i vater eininga di er langs X-aksen:
from microbit import *
while True:
reading = accelerometer.get_x()
if reading > 20:
display.show("H")
elif reading < -20:
display.show("V")
else:
display.show("-")
Viss du heldt eininga flatt skal den vise -. Viss du tippar den mot venstre å høgre bør den vise høvesvis V eller H.
Sidan me vil at eininga vår skal reagere på forandring heile tida brukar me ei while-løkke. Den fyrste tingen som skjer inne i while-løkka er at den måler langs X-aksen og lagrar resultatet i variabelen reading (avlesing på norsk). Fordi akselerometeret er veldig sensitivt har me lagt inn eit slingringsmonn på +/- 20. Det er difor if og elif-setningane sjekkar for respektivt > 20 og < -20. Til slutt seier else-setninga at viss verdien til reading er mellom -20 og 20 så er eininga i vater. For kvar setning brukar me displayet til å vise ein passande tekst.
Det er ein get_y-metode for Y-aksen og ein get_z-metode for Z-aksen.
Viss du lurar på korleis ein mobiltelefon veit om du heldt mobilen horisontalt eller vertikalt, så er det fordi den brukar eit akselerometer på akkurat same måte som programmet over. Spelkontrollarar inneheldt òg akselerometer som kan hjelpe deg å navigere.
Musikalsk galskap
Ei av dei beste eigenskapane til MicroPython er kor saumlaust du kan setje saman ulike funksjonar til micro:bit-en. Til dømes kan me gjere om eininga til eit "musikalsk" instrument. Kvifor me brukar hermeteikn kring musikalsk finn du raskt ut!
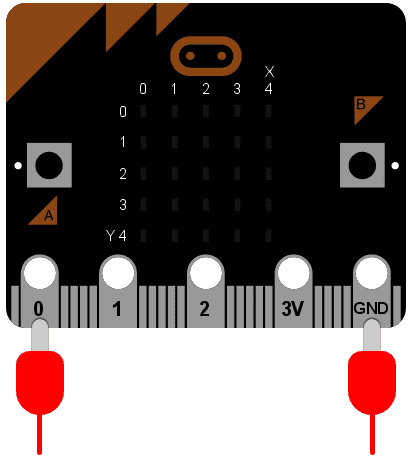
Set inn ein høgtalar slik du gjorde i oppgåva "Lage musikk med micro:bit". Bruk krokodilleklemmer til å feste pin 0 og GND (jord) til den positive og negative inngangen på høgtalaren -- det speler inga rolle kva veg dei er kopla.
Kva skjer viss me les av akselerometeret og spelar det av som toner? La oss finne det ut!
from microbit import *
import music
while True:
music.pitch(accelerometer.get_y(), 10)
Den viktigaste linja er utan tvil på slutten, og den er relativt enkel. Me nøstar lesinga frå Y-aksen som frekvensen, og matar den inn i music.pitch-metoden. Me let denne frekvensen spele i berre 10 millisekund fordi me vil at tona skal endre seg raskt når me tippar eininga til sides. Sidan me brukar ei while-løkke som går for alltid bli alltid endringane langs Y-aksen lest av.
Det er alt!
Tipp eininga framover og bakover. Viss lesinga langs Y-aksen er positive, så vil den endre tonehøgda micro:bit-en spelar av.
Klarar du å spele ein melodi på dette enkle instrumentet? I siste del skal me sjå på nokre enkle forbetringar du kan gjere.
 Prøv sjølv
Prøv sjølv
Dette kan du til dømes gjere ved å leggje inn ei if-setning, eller ved å bruke abs-funksjonen.
Me menneske har problem med å høyre frekvensar over 18 000 Hz og under 40 Hz, og frekvensane som er behagelege å høyre ligg gjerne mellom 80 og 400 Hz. For å fikse micro:bit-en slik at den berre speler toner i dette intervallet kan me gjere noko som liknar på dette:
from microbit import *
import music
while True:
Y = A * abs(accelerometer.get_y())
if Y < 80:
Y = 80
elif Y > 400:
Y = 400
Z = abs(accelerometer.get_z())
music.pitch(Y, Z)
Neste oppgåve i samlinga er Python: Nettverk. Klikk vidare for å halde fram gjennom samlinga.
Forbedre denne siden
Funnet en feil? Kunne noe vært bedre?
Hvis ja, vennligst gi oss tilbakemelding ved å lage en sak på Github eller fiks feilen selv om du kan. Vi er takknemlige for enhver tilbakemelding!