Ultralydsensor
Ultralydsensor
Skrevet av: Oversatt fra Espen Clausen nettside
Oversatt av: Øistein Søvik
Ultralydsensor
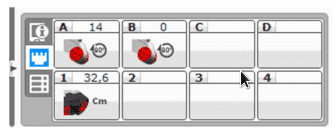
I disse oppgavene skal vi ta i bruk ultralydsensoren, og lære å bruke ultralydsensoren til å måle avstander til objekter. Deretter kan vi få roboten til å utføre ulike oppgaver basert på informasjon som den får fra sensoren.
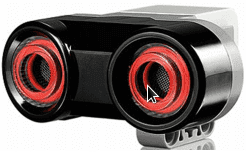
Ultralydsensoren sender ut lydbølger og tolker ekkoene den får tilbake til å finne gjenstander og måle avstanden til den. I denne oppgaven skal vi konstruere og programmere roboten slik at den gjennom å bruke ultralydsensor stopper en gitt avstand fra et objekt.
 Fremgangsmåte
Fremgangsmåte
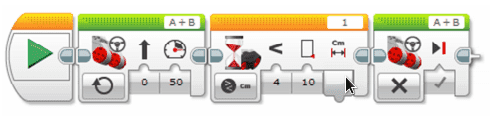
Et ferdig program, kan se slik ut:
Forbedre denne siden
Funnet en feil? Kunne noe vært bedre?
Hvis ja, vennligst gi oss tilbakemelding ved å lage en sak på Github eller fiks feilen selv om du kan. Vi er takknemlige for enhver tilbakemelding!