Kodetimen - Programmer en selvkjørende robot med BitBot
Kodetimen - Programmer en selvkjørende robot med BitBot
Skrevet av: marikisfoss
Introduksjon
Mål: Elevene skal lære hvordan roboter kan bruke sensorer og enkel programmering for å navigere i omgivelsene. Oppgaven gir også innblikk i hvordan roboter kan oppdage hindringer og navigere selvkjørende.
Utstyr dere trenger
Steg 1: Introduksjon til roboter og Bit:bot
Roboter kan utføre oppgaver selvkjørende ved hjelp av sensorer og programmering. Sensorer gir roboten informasjon om omgivelsene, mens programmering bestemmer hvordan roboten skal reagere på denne informasjonen. For eksempel kan roboter bruke ulike sensorer og motorer som kan kombineres for å navigere og utføre oppgaver autonomt. (Autonomt betyr selvstyrende!)
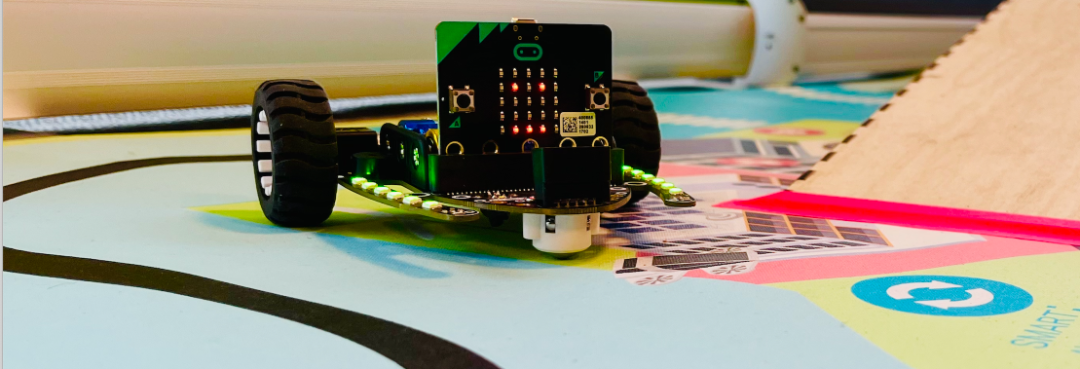
BitBot er en liten, programmerbar robot som bruker en micro:bit-mikrokontroller for styring. Ved å programmere micro:bit, kan BitBot instrueres til å følge linjer på bakken ved hjelp av innebygde linjesensorer. Disse sensorene registrerer kontraster mellom lys og mørk overflate og gjør det mulig for BitBot å holde seg på en bestemt sti. BitBot har også en ultralydsensor som kan måle avstanden til objekter foran seg. Dette gjør det mulig å programmere den til å stoppe, svinge, eller velge en annen vei når den møter hindringer. Programmeringen kan gjøres med enkle blokkbaserte verktøy som MakeCode, som gjør roboten lett å bruke for nybegynnere.
Steg 2: Planlegg hva bit:boten skal gjøre
Steg 3: Programmering av bit:boten
Eksempler på mulige funksjoner:
A) Følge en linje
Lag en bane med svart teip eller svart tusj på et lyst underlag som BitBot-en kan følge. Bruk linjesensorene på BitBot til å få roboten til å oppdage og følge linjen automatisk.
Kodeblokk: Nå ønsker vi at roboten skal følge linjen vi har laget. Derfor finner vi frem en Gjenta for alltid-kloss. Deretter henter vi frem en Hvis - Ellers-kloss som skal styre hva servoene i hjulene skal gjøre, avhengig av hva linjesensoren plukker opp. Deretter finner vi frem blokker for venstre linjesensor og høyre linjesensor.
Denne koden vil se slik ut: 
 Test prosjektet
Test prosjektet
Last ned koden til Micro:biten og sett Micro:biten i Bit:boten for å teste om linjesensorene fungerer!
B) Hindringsunngåelse
Denne koden gjør at Bit:boten kjører unna ulike hinder som plasseres utover på banen ved hjelp av ultralydsensoren.
Denne koden vil se slik ut: 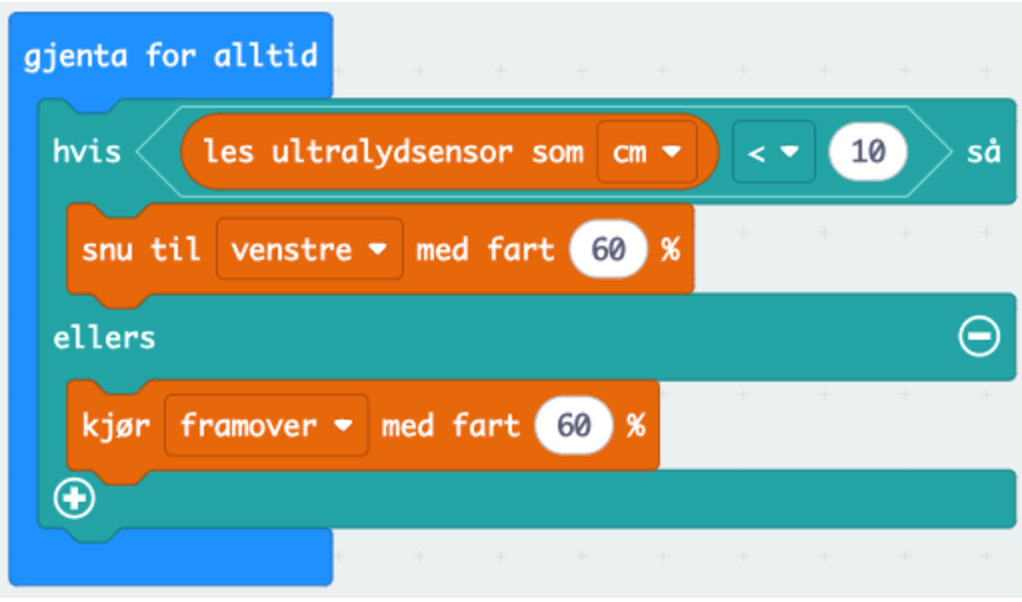
Test prosjektet
Last ned koden til Micro:biten og sett Micro:biten i Bit:boten for å teste om ultralydsensoren fungerer!
C) Lysrespons
Få Bit:Bot til å lyse opp LED-lysene hvis det blir mørkt!
Bruk Hvis - så-klosser, Inndata-klosser og lysblokker i MakeCode for å programmere lysene. Her kan dere selv velge hvilken farge som skal lyse!
Hvis - så -klossen gir micro:bit'en beskjed om at lysdiodene på bit:boten skal endre farge dersom lysnivået som måles gjennom inndata-klossen er under et visst nivå. Dette må dere teste selv for å finne ut av hvilket nivå dere skal putte inn, da rommet dere er i vil ha ulikt lysnivå!
Et eksempel på hvordan denne koden vil se ut:

Steg 3: Test og juster roboten
Utfordring
5. Utvidelsesoppgaver (valgfritt)
Forbedre denne siden
Funnet en feil? Kunne noe vært bedre?
Hvis ja, vennligst gi oss tilbakemelding ved å lage en sak på Github eller fiks feilen selv om du kan. Vi er takknemlige for enhver tilbakemelding!